Al diseñar
con un PIC, lo primero que se debe tener en cuenta
es qué PIC se va a utilizar. La primer pregunta
a responder es cuántas patas de los puertos
de I/O necesita el proyecto.
Esto implica el uso de un PIC de
8, de 18, de 29 o de 40 patas. Nuestro proyecto
debe ser económico y por lo tanto debe funcionar
con un PIC de 8 o de 18 patas. El PIC de ocho patas
utiliza una pata para el clock otra para fuente
y masa y el resto pueden ser entradas y salidas
es decir que quedan 5 patas de I/O. Nuestro proyecto,
si sólo se lo va a utilizar para probar redes
de PC, requiere sólo 4 patas de salida como
mínimo, pero nos quedaría un diseño
muy específico.
Si se pretende un diseño
más flexible debemos pasar a un PIC de 18
patas. Dentro del grupo de 18 patas, se encuentran
diferentes tipos de PICs. Existen algunos con entradas
analógicas (con conversor A/D) y otros con
entradas digitales. Nosotros requerimos sólo
entradas digitales.
Luego se pueden elegir micros con
memoria regrabable o con memoria permanente. Realmente
se debería tener dos micros. Uno regrabable
para el trabajo de optimización del programa
y otro permanente para el dispositivo final. La
opción es por lo tanto evidente: para el
trabajo de diseño optamos por el 16F84A y
para el dispositivo final su equivalente con memoria
de microfusibles el PIC-16C621A.
Luego de elegir el PIC debemos
optar por el dispositivo de “clock”
y el tipo de “reset”. Para una función
de prueba de un par telefónico, parecería
que no se requiere precisión en el clock.
Y en efecto el modelo básico de probador
trabaja a muy baja frecuencia para que se puedan
observar los destellos de los leds. Sin embargo
es probable que mas adelante se modifique el dispositivo
para realizar una prueba de atenuación del
par telefónico y entonces se requiera una
frecuencia más alta y más estable.
Por esa razón optamos por elegir un clock
a cristal y una división interna para llegar
a la frecuencia correcta de los pulsos de salida.
De cualquier modo, si el lector lo desea, puede
utilizar un clock a RC modificando el divisor de
frecuencia por uso de un programa modificado para
RC. Recuerde que en el momento de grabar el PIC
debe indicarle al Ponyprog qué tipo de oscilador
va a utilizar.
Ahora podemos crear nuestro circuito,
que en principio tendrá un conector del tipo
telefónico que se puede observar en la figura
1 y un cable multipar como el mostrado en la figura
2.
Observe los colores de los pares
normalizados: marrón y blanco; naranja y
blanco; verde y blanco y por último azul
y blanco. Estos cables se terminan en ambas puntas
con los conectores telefónicos machos. A
la salida de nuestro dispositivo se colocará
un conector hembra que puede ser recuperado de una
placa de red en desuso y en la otra punta otro conector
hembra con resistores de carga.
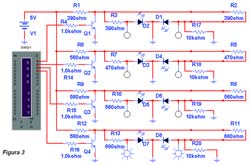
En la figura 3 se puede observar
un posible circuito de prueba realizado en Workbench
Multisim para que Ud. lo pueda probar en su computadora.
El archivo se puede bajar desde
nuestra página web con el password “sin189”
y el nombre de archivo new0623.msm
Este es un circuito muy simple
pero efectivo. En principio posee componentes que
sólo son imprescindibles en la simulación.
Observe al lado de cada led la existencia de un
voltímetro pasa no pasa, representado con
círculos. Este círculo se iluminará
cuando la tensión sobre el LED supere un
voltio. En el circuito real basta con observar el
LED encendido. Los resistores R17 y equivalentes
son necesarios porque los voltímetros pasa
no tienen impedancia infinita y el sistema opera
inadecuadamente cuando el voltímetro queda
descargado.
El generador de palabras XWG1,
los transistores Q1 al Q4 y los resistores R4, R14,
R15 y R16 forman parte del PIC. Los resistores R1,
R6, R9 y R12 que son los resistores de pull-up del
puerto de salida, no son necesarios porque el PIC
tiene salida Push- Pull.
Esto significa que el circuito
básico sólo requiere a R3, D1 y D2
en la sección local y R2 en el tapón
de prueba remoto. Sólo mencionamos una de
las ramas del circuito porque las otras son totalmente
similares.
Nuestro probador contiene dos secciones
bien definidas. Un pequeño gabinete con una
batería de 9V que excita a un PIC y un display
de 8 LEDS con forma de matriz de 4x2 es decir cuatro
filas por dos columnas y un tapón con resistores
que se conecta en la otra punta del cable multipar.
El dispositivo básico enciende
el led d11 y de inmediato contesta el d12 con otro
encendido. Luego enciende el d21 y contesta el d22
y así sucesivamente si todo está bien
conectado. Si hay entrecruzamientos de pares las
respuestas no ocurren en secuencia y si hay un cable
cortado falta una o más respuestas.
El funcionamiento se explica porque
en que las salida del PIC se presentan pulsos en
una secuencia de un quinto de segundo aproximadamente
por paso, cosa que puede observarse encendiendo
la simulación y prestando atención
a los voltímetros de la izquierda. La corriente
que indica la excitación de un determinado
par (en nuestro caso el superior) circula por R1,
R3 y D2 a masa. Si el para está correctamente
conectado también se produce una corriente
por R2 y D1 que se presenta al mismo tiempo que
por R3 D2. La simultaneidad de los encendidos de
una fila nos indica que los cables no están
cruzados.
La existencia de un cable cruzado
hace que se encienda un LED de la primer columna
en una determinada fila y un led en la segunda columna
pero de otra fila. Es decir que se debe encender
cada led con su compañero de la derecha.
Un hilo cortado de ida o de retorno se presenta
como un led de la fila de la derecha que no se enciende
y un cortocircuito en un par significa que el led
de la derecha se enciende excesivamente y el de
la izquierda se apaga.
Si el lector siente curiosidad
de saber por qué los resistores de carga
y el de excitación son de diferente valor
para cada par, le aclaramos que se trata de una
inteligencia extra que tiene nuestro circuito con
respecto a los de la competencia. En nuestro circuito
las filas se iluminan de mayor a menor a medida
que bajamos en altura.
La primer fila se ilumina mucho,
la segunda menos la tercera menos aun y la última
tiene el brillo menor si los pares están
correctamente conectados.
Pero si los dos cables de un par
están confundidos con los dos pares de otro,
esta variación gradual se pierde y se produce
un salto de brillo que nos avisa del error.
El proyecto didáctico está
encarado para que en una versión futura sea
el PIC el que tome la decisión de indicar
si la instalación está correctamente
realizada. Es decir, que debemos pensar todo como
para que el dispositivo haga una lectura e indique
bien o mal de algún modo (visual o acústico).
Si indica mal, entonces si se debe
realizar una medición más laboriosa
informándose de que cosa está mal
para poder corregirla.
¿Cómo hace
el PIC para comparar el brillo de los leds?
Como no puede medir el brillo, le hacemos medir
la corriente por el diodo de la primer columna y
compararla con la corriente por el led de la segunda
columna. Si las corrientes son iguales la instalación
está correctamente realizada. Por lo tanto
se debe preveer un dispositivo comparador, cuya
información de salida se realimente a una
futura entrada del PIC.
Del mismo modo el PIC deberá
analizar si los leds de columna se encienden en
la secuencia correcta por realimentación
de señales a otras entradas.
Si el lector desea entender todo
este funcionamiento sin ninguna duda le aconsejamos
que pruebe el circuito en un Workbench Multisim
cortando o cambiando de lugar algún cable.
Tenga en cuenta que el brillo del indicador de los
voltímetros no cambia en la simulación,
pero se puede observar la detección de pares
cortados y con un cable intercambiado tal como ocurre
en la realidad. Si no posee un Workbench Multisim
póngase en contacto con el autor y si lo
posee, pero no lo sabe usar, recuerde que el autor
escribió una serie de artículos explicando
su uso. También puede utilizar un CD y un
video sobre el manejo del Workbench 5.1 cuyo autor
es el Ing. Vallejo que si bien no es la última
versión se utiliza de un modo muy similar
a ella.
Ahora que tenemos una idea concreta
de que lo debe hacer nuestro circuito básico
pasaremos a la etapa de diseño del programa.
Es decir un programa siempre se genera luego que
el programador captó la realidad.
Una vez que realizó la prueba
a mano sin automatización (conectando tensiones
y observando el encendido de los leds o realizando
una adecuada simulación) se debe encargar
de plasmar ese trabajo en un programa para que el
PIC lo realice automáticamente con la menor
intervención del operador.
El programa se puede realizar en
cualquier editor de texto porque sólo se
trata de un archivo de texto puro (sin señales
ocultas de cambio de renglón o de cambio
de página como por ejemplo el “edit”
del DOS) pero nosotros preferimos utilizar las herramientas
provistas gratuitamente por Microchip, por ejemplo
el MPLAB que contiene un editor de texto especializado
dentro de un sistema de creación de un proyecto
completo.
El MPLAB nos permitirá editar
nuestro programa, depurarlo y compilarlo en un archivo
del tipo .hex que es el único tipo de archivo
que entiende un cargador de PICs. Si lo desea también
puede probar el programa en forma simulada, antes
de cargarlo realmente en forma física. Puede
corregir el modelo simulado y terminar las correcciones
luego en la realidad.
Y aunque Ud. no lo crea todo esto
es gratuito y si tiene la paciencia de acompañarme
durante unos meses Ud. aprenderá a hacerlo
con ejemplos simples y entendibles del tipo paso
a paso.
Si no tiene instalado el MPLAB
puede obtenerlo gratuitamente en www.microchip.com
y si no entiende cómo instalarlo consiga
uno de mis viejos artículos sobre el tema,
en donde le indicamos cómo hacerlo paso por
paso. Nosotros vamos a suponer aquí que lo
tiene instalado correctamente. |